Drawer 4020
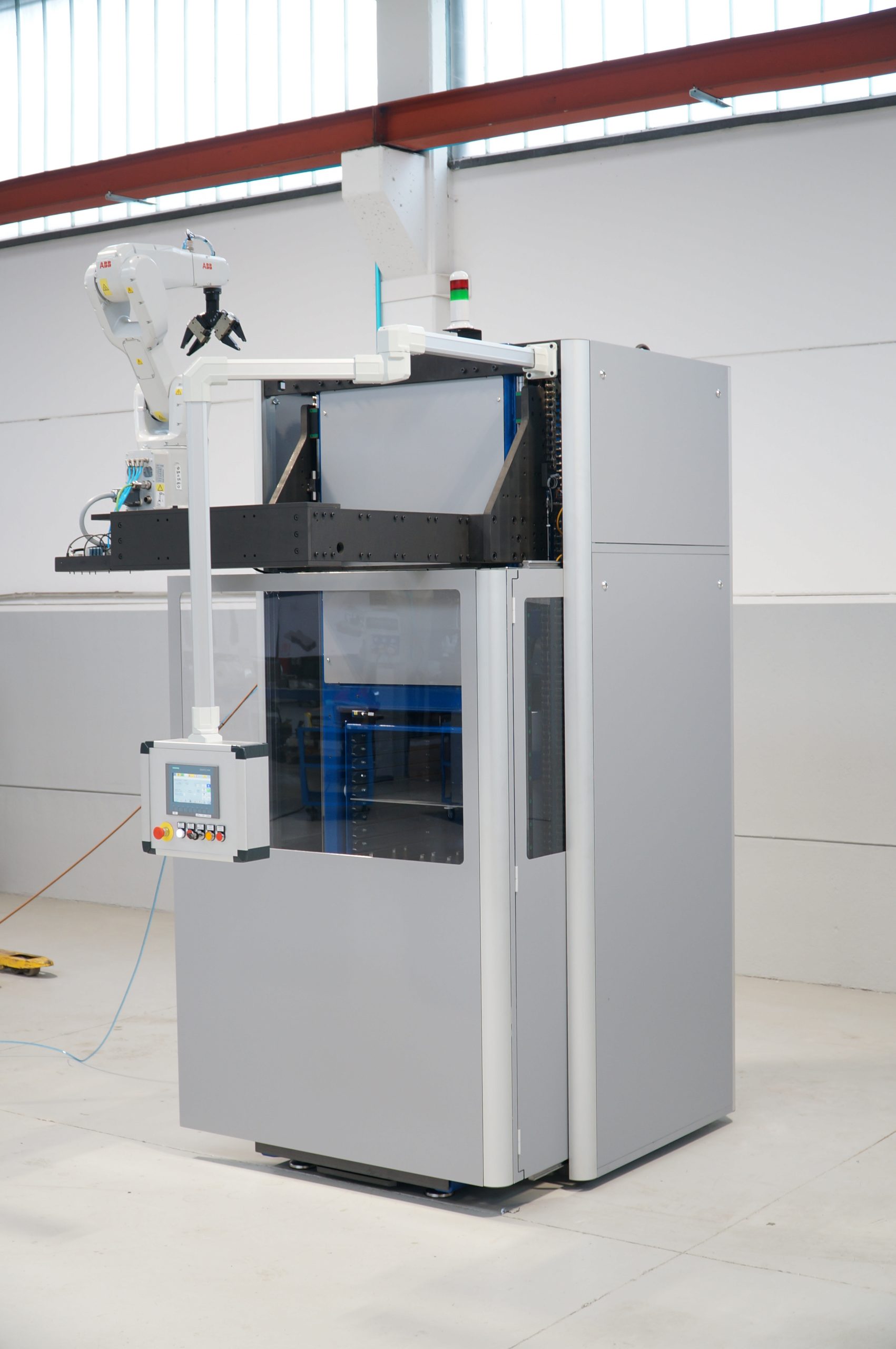
“DRAWER 4020” è la soluzione per carico/scarico su macchine CNC con robot antropomorfo a posizionamento dinamico.
Si differenzia dalla maggior parte delle automazioni sul mercato perché il robot è installato su di un carro con movimentazione verticale che porta ad avere i seguenti vantaggi:
- posizionamento del robot allo stesso livello della zona di carico macchina
- isola di lavoro compatta e facilmente personalizzabile sulle esigenze del cliente
- facile accesso alla macchina utensile con il sollevamento del carro fuori ingombro con riduzione dell'area occupata
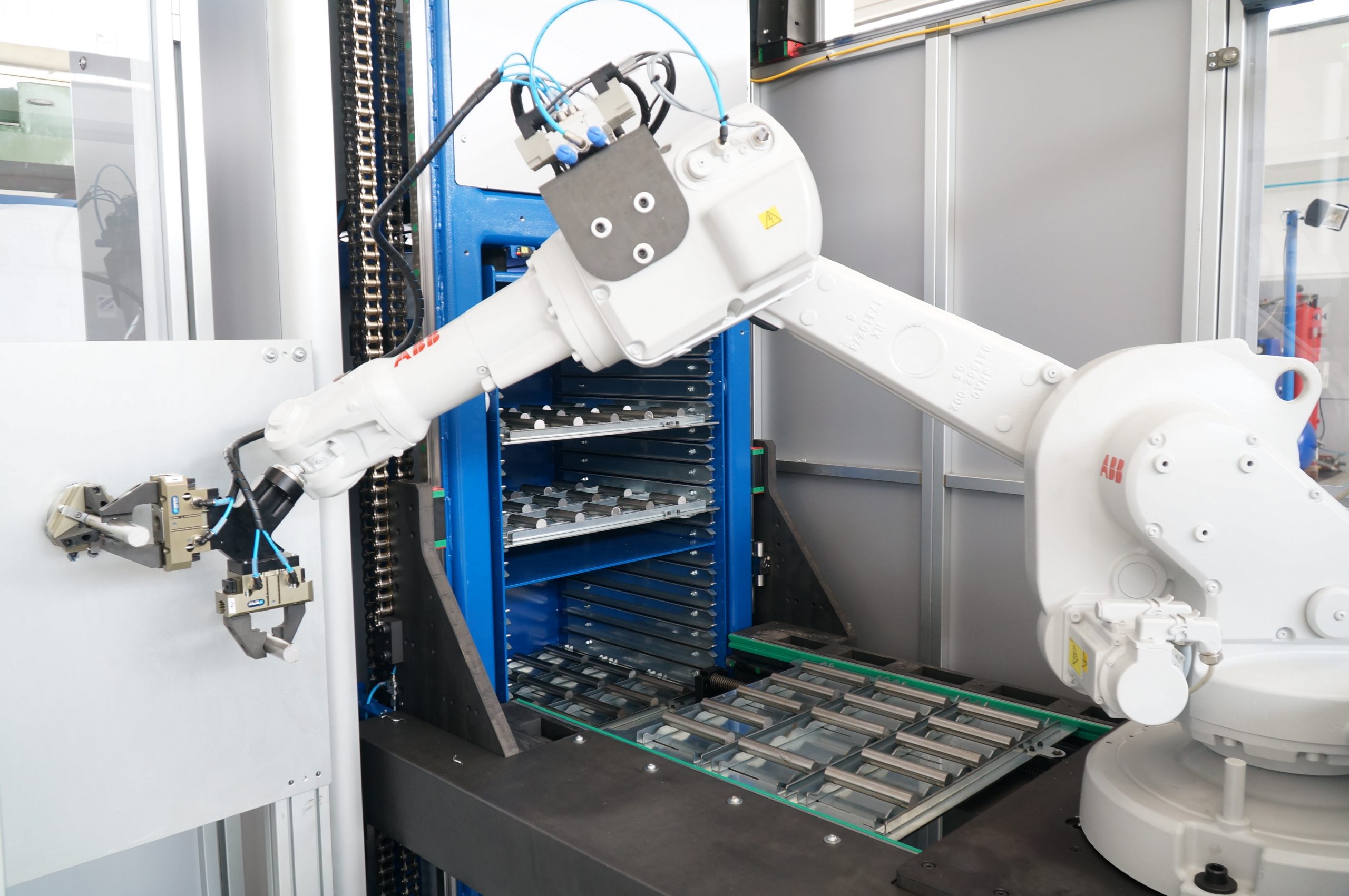
L’impianto “DRAWER 4020” è stato sviluppato per la movimentazione di pezzi con peso fino a 10 kg come asservimento di macchine utensili CNC come torni, dentatrici, centri di lavoro e rettifiche di ingranaggi/alberi.

Il robot può essere installato sul lato destro, sinistro o frontale del carro in modo da essere sempre nella posizione più idonea per il carico in macchina o per asservimento di due macchine.
In funzione della tipologia di pezzi da manipolare, dei tempi ciclo e della tipologia di macchina utensile si definisce la taglia del robot e la configurazione del polso che può essere con pinza singola o doppia.
“DRAWER 4020” è predisposta per l'installazione di stazioni di ripresa pezzo, fasatura, soffiaggio, etc. su piani lavorati e spinati.
L'asse verticale è bilanciato con contrappesi che variano in funzione del robot installato ed è mantenuto in posizione con freni pneumatici sulle guide verticali; questa soluzione porta ad avere i seguenti vantaggi:
- ridotto ingombro al suolo con macchina in posizione di riposo
- facile accesso alla macchina utensile per attrezzaggio, carico manuale su piccoli lotti di produzione, manutenzione
- sicurezza dell'operatore quando lavora sotto al carro
- ripetibilità di posizionamento robot in fase di carico e riduzione del possibile errore dovuto all'innesco di vibrazioni date dalla velocità del robot
- limitata coppia di utilizzo del motore asse verticale a garanzia di una maggiore durata
Il riparo mobile è installato su guide a ricircolo di sfere per facilitare le operazioni di apertura/chiusura e garantirne il corretto funzionamento per l'intera vita della macchina.
La macchina è definita stand-alone in quanto ha un proprio PLC che funziona anche da controllo assi ed è indipendente dal tipo di robot installato; tutte le operazioni di set-up vengono eseguite tramite il pannello operatore touch-screen.


CARATTERISTICHE TECNICHE
- Struttura in profilo di acciaio tubolare ad alto spessore (10 mm) elettrosaldato, rinvenuto e lavorato di macchina utensile
- Gruppo di estrazione pallet con movimentazione a due assi cartesiani su guide a ricircolo di sfere
- asse verticale con movimentazione a catena controbilanciato e dotato di freno di sicurezza
- asse orizzontale con movimentazione con vite trapezoidale
- Motori assi Siemens sincroni (brushless) con encoder assoluto
- Gruppo di sollevamento carrello ad azionamento pneumatico
- Quadro elettrico integrato nella struttura, montato su ripiano estraibile
- Gestione software con PLC Siemens e monitor touchscreen a colori (comprensivo di interfaccia robot e macchina utensile)
- Protezioni perimetrali integrate in lega di alluminio con relativi dispositivi di sicurezza a norma
- Robot antropomorfo 6 assi integrato sul gruppo di estrazione pallet con portata variabile 5-30kg
- Carrello portapezzi estraibile ed indipendente con pallet personalizzabili
- Conformita “CE”, “UL/CSA”, requisiti di “INDUSTRY 4.0”.
- Interfacciamento con macchina asservita mediante i piú diffusi bus di campo (standard PROFINET), o con segnali I/O HW


Richiedi Preventivo